




科技一周~人性的科技
作者 硅谷寒 | 2013-11-16 17:53 | 类型 硅谷科技周报 | 3条用户评论 »
系列目录 科技一周
科技一周~人性的科技 2013/11/16
科技文明的进步,并不如想象中那般阳春白雪、神技孤高,更多的时候,它离不开人性中那些阴冷暗黑的一面,比如,贪婪、嗜血、痴迷、还有懒惰,诚如张小龙全民打飞机之“性与暴力”,也诚如雷布斯高喊“小米最最最”之“真假莫测”。
今天科技一周的主题正是要给大家呈现一件最体现人类懒惰本性的智能神器:iRobot Roomba 880。在此之前,还是先概览本周的科技焦点:
本周一,iRobot公司宣布最新款的懒人神器,扫地机器人Roomba 880,正式开售。与前一代扫地机器人相比,Roomba 880的清理能力提升50%,更绝的是,它增添了一项新本领:吃毛发。Roomba 880可以把任何毛发碾碎并吞噬,同时又不会划伤地板。从此以后,人们再不需要手动去清理刷子上的毛发了。 吃不吃毛发,其实与我们“科技”一周并不太相关,无非是加了把小碎刀,构思巧妙而已。这里,我想重点提的是,Roomba机器人所体现出来的人工智能技术:基于广度优先搜索的自引导(Breadth-First-Search Based Self-Navigation)。
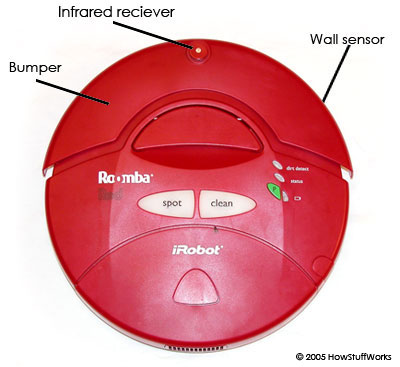
Roomba并没有安装全方向摄像头(Omnidirectional Camera)和惯性测量器(IMU,Inertial Measurement Unit),仅仅依靠触碰传感器来识别障碍,而且只有一种恒定运动速度。它是如何完成房间平面的遍历呢?
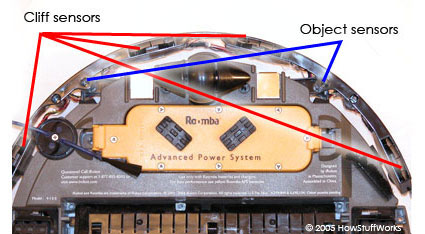
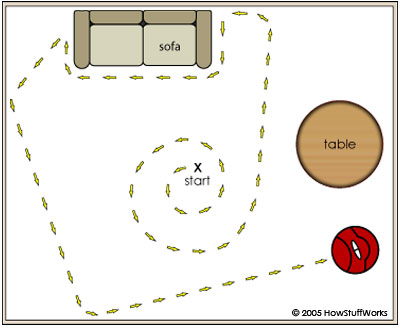
在左图中,我们可以看到Roomba装有三个传感器:墙壁传感器、悬崖传感器、小物体传感器,来探测障碍物。我们把Roomba的起点看作“图”(Graph)的根节点,在每一个节点处的360度方向上可移动的下一步看作是该节点的子节点。Roomba从起点开始,以螺旋状轨迹向外前进,其本质上就是依照广度优先算法来遍历子节点,然后再增加搜索的深度,层层扩张,直到碰到各种障碍,相当于到达了某条路径最深处的叶结点(Leaf Node)。
Roomba用一个简单的BFS,就可以遍历整个房间了。然而,这样做的结果是,平均用力,效率低下,不能很快区分出干净与肮脏的不同地带。人类的取巧之处就在于只清理肮脏的地方,干净的地方就等到什么时候变脏了,什么时候再去清理。所以,人类20分钟做完的事情,Roomba要干上一、两个小时。
当然,Roomba还有很大的潜力可以提高,如果未来配备了摄像头与惯性装置,并能够联网实时获取数据,那么不仅能够极大提高它的清理效率,甚至可以让它开关门、爬楼梯、扫墙壁、并自己智能化地做出是否应该搞家务的决断。倘若再给它贴上美丽的苍老师“画皮”,不就正是我们期待的那个机器人女仆吗?:) 注:Roomba的图片来自http://electronics.howstuffworks.com/gadgets/home/robotic-vacuum2.htm
| |
 (没有打分) (没有打分) |

雁过留声
“科技一周~人性的科技”有3个回复
现了5岁小男孩Miles Scott的生前心愿,
生前”一词貌似不妥。
多谢,已改正
家里买了一个国产的扫地机器人,如上面的类似,900块人民币,当玩具玩玩而已,有时候会卡在什么地方,还不能100%满意。